
5.相似矩阵及二次型
相似矩阵及二次型
特征值
定义
一般情况下,向量经过线性映射后,方向发生改变
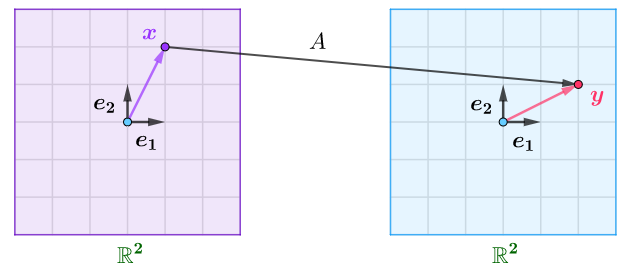
不过,有可能部分向量,在线性映射后方向没有改变,只是发生了伸缩:
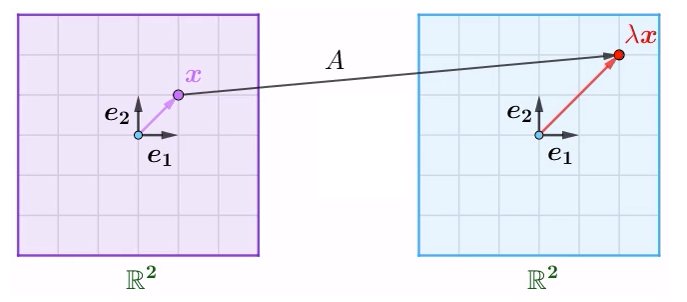
这些没有发生方向改变的向量,称为特征向量,变换前后的伸缩比称为特征值,其严格定义如下:
设$A$是$n$阶方阵,$\boldsymbol{x}$为非零向量,若存在数$\lambda$使得下式成立:
那么将数$\lambda$称为$A$的特征值,非零向量$\boldsymbol{x}$称为$A$的对应于$\lambda$的特征向量。
单位阵
对于$n$阶单位阵$I$始终有:
意味着向量空间$R^n$中所有向量(除了零向量)$x$都是单位阵$I$的特征向量
求法
经过转换后:
假设存在特征值和特征向量,那么上述方程必然有非零解。因此根据解的个数可知,系数矩阵$A-\lambda I$必然不是满秩矩阵(否则$(A-\lambda I)\boldsymbol{x} = \boldsymbol{0}$只有唯一解,该唯一解就是零向量,根据定义,特征值和特征向量不能是零向量),再结合上满秩与行列式的关系,此时必然有:
这样就有两个式子了,可以解出要求的两个未知数:
根据二阶行列式的计算方法可以直接算出$\lambda$的值,算出$\lambda$的值后,将$\lambda$带入到$(A-\lambda I)\boldsymbol{x} = 0$,利用求解集的方法,算出$x$的解集,带入不同的$\lambda$即可求出不同的特征向量
假设解集
意味着特征值为0对应的特征向量(零向量除外),将它画出来就是下图定义域中的绿线,其上的任意向量都会被映射到零点:
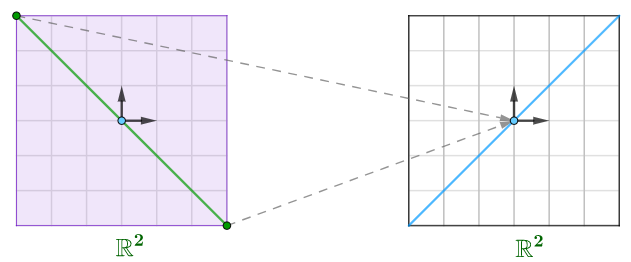
很显然,图中的绿线是一个向量空间,因为其中都是特征值为 0 的特征向量(零向量除外),所以也称为特征值为 0 的特征空间
而判定向量$x$是否是矩阵$A$的特征向量的方式很简单,只需要将$Ax$相乘,如果结果可以化成$\lambda x$的形式,就是特征向量
已知$A$,某个特征向量$x$,可以根据$Ax=\lambda x$求列方程求解$\lambda$,以及$A$中的未知数
性质
- 转置矩阵与原矩阵特征值相同
- 行列式的值=特征值的乘积,所以如果$|A|=0$,那么必有一个特征值为0
- 矩阵的特征值等于逆矩阵特征值的倒数
- 若$\lambda_1,\lambda_2,\cdots,\lambda_n$为$n$阶方阵$\boldsymbol{\boldsymbol{A}}$的特征值,则:
矩阵的特征值和矩阵对角线元素之和(迹)相同,即:
根据特征多项式:若$λ$是矩阵$A$的特征值,则$f(λ)$就是多项式矩阵$f(A)$的特征值
定理:
已知$\lambda_1,\lambda_2,\cdots,\lambda_m$是$n$阶方阵$A$相异的特征值,以及$\boldsymbol{v}_1,\boldsymbol{v}_2,\cdots,\boldsymbol{v}_m$是$\lambda_1,\lambda_2,\cdots,\lambda_m$对应的特征向量,则向量组$\{\boldsymbol{v}_1,\boldsymbol{v}_2,\cdots,\boldsymbol{v}_m\}$线性无关。
反过来说,如果特征值$\lambda_1$对应了多个特征向量,那么这些特征向量的组合仍然是方阵$A$的特征向量
如果矩阵A能被拆分成$A=(a-1)E+B$,利用$rank(B)=1$求$B$的特征值和特征向量比较方便
结论:n阶矩阵A,r(A)=1,则A的特征值一个是A的迹(主对角元素和),其余都是0
证0是n-1重特征根:
因为$r(A)=1$,$A$的行列式为0,又因为行列式等于特征值的乘积,所以0必为$A$特征值
求0对应的特征向量,$Ax=0x=0$,则求0对应的特征向量即求$Ax=0$的解
$r(A)=1,Ax=0$必有$n-1$个线性无关解向量,那么0至少为$n-1$重特征根
证A的迹为一个特征值:
$r(A)=1$,则$A$必可表示成一个列向量和一个行向量的乘积,设$α$和$β$为列向量 ($T$表示转置)(因为$A$的秩为1,所以α和β不可能为零向量)
则$A=αβ^T,Aα = αβ^Tα = α(β^Tα) = (β^Tα)α$
则$β^Tα$是$A$特征值,特征向量为$α$
相似矩阵
定义
设$A$,$B$都是$n$阶方阵,若有可逆矩阵$P$,使得
则称$\boldsymbol{P}$为相似变换矩阵,称$\boldsymbol{B}$是$\boldsymbol{A}$的相似矩阵,记作:
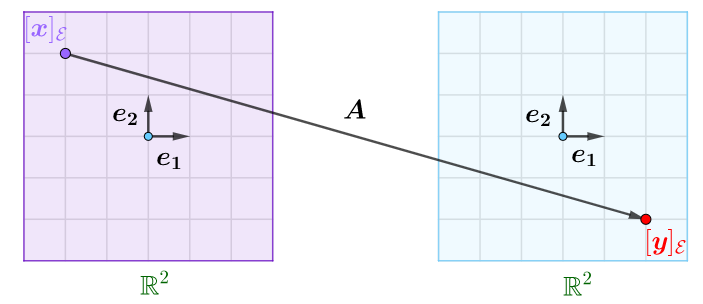
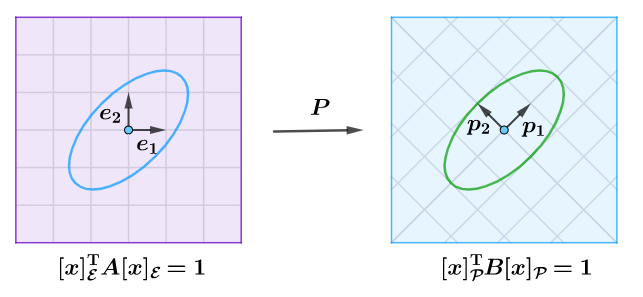
单解释下上述定义,如果$\boldsymbol{A}$和$\boldsymbol{B}$是相似矩阵,那么两者实际上是同一个线性映射在不同基下的代数表示(需要参考):
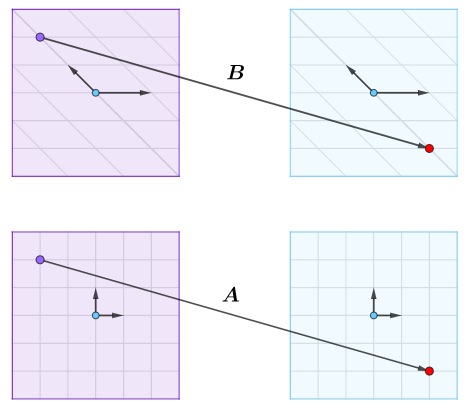
在自然基下,上述向量的坐标分别是$[\boldsymbol{x}]_\mathcal{E}$和$[\boldsymbol{y}]_\mathcal{E}$,上述线性映射可用矩阵$\boldsymbol{A}$来表示,即有$\boldsymbol{A}[\boldsymbol{x}]_\mathcal{E}=[\boldsymbol{y}]_\mathcal{E}$。或者图示如下:
或者在基$\mathcal{P}$,上述向量的坐标分别是$[\boldsymbol{x}]_\mathcal{P}$和$[\boldsymbol{y}]_\mathcal{P}$,上述线性映射可用矩阵$\boldsymbol{B}$来表示,即有$\boldsymbol{B}[\boldsymbol{x}]_\mathcal{P}=[\boldsymbol{y}]_\mathcal{P}$。或者图示如下:
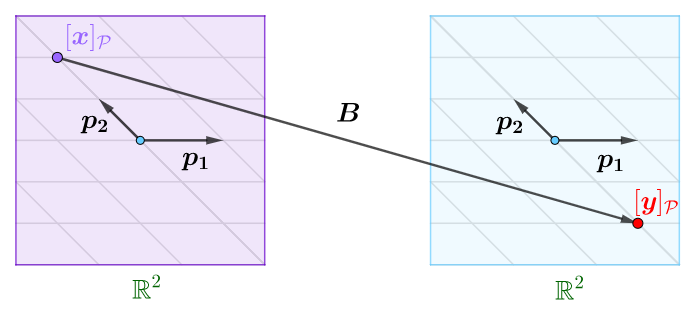
上面的矩阵$A$和矩阵$B$就是同一个线性映射在不同基下的代数表示
如果存在可逆矩阵$P$,也就是存在过渡矩阵$P$,通过坐标变换公式:
那么矩阵$\boldsymbol{A}$和矩阵$\boldsymbol{B}$就可通过过渡矩阵$\boldsymbol{P}$联系起来,此时$\boldsymbol{A}$和$\boldsymbol{B}$就是相似矩阵:
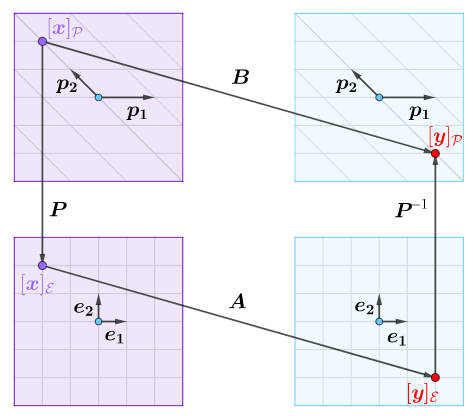
相似矩阵集合了基变换和坐标变换
性质
若$A\simeq B$,则:
若$A\simeq B$,且$A、B$可逆,则:
若$A\simeq B,B\simeq C$,那么:
相似对角化
当需要算矩阵的高次幂时$A^n$,直接计算会变得非常复杂,但是对角矩阵的高次幂就很好算:
而把常规矩阵变为对角矩阵的步骤,叫做对角化
条件
- $\Lambda\sim A$,就直接说明了可相似对角化,即有$k$个线性无关的特征向量
- 实对称矩阵可相似对角化;
- 方阵的$n$个特征值彼此都不相同,也就是都是单根的话,则矩阵可相似对角化,如果有重根,看第三种情况;
- 验证$k$重根是不是具备$k$个线性无关的特征向量,也就是看$A-λE$或$λE-A$的秩是否等于$n-k$,若相等,则矩阵可相似对角化,不相等,则不能进行相似对角化。即几何重数=代数重数才能对角化。单重特征根的几何重数=代数重数=1。
步骤
如果$n$阶方阵$A$有$n$个线性无关的特征向量$\boldsymbol{p_1},\boldsymbol{p_2},\cdots,\boldsymbol{p_n}$,那么如下矩阵:
可以使得:
其中$\Lambda$为如下对角阵
其中的$\lambda_1,\lambda_2,\cdots,\lambda_n$为特征向量$\boldsymbol{p_1},\boldsymbol{p_2},\cdots,\boldsymbol{p_n}$对应的特征值,该过程称为对角化
相似对角化之后,$A^n=P\Lambda^{n}P^{-1}$,这是一个显然的结论,比如$A^2=(P\Lambda P^{-1})(P\Lambda P^{-1})$,中间可以消掉,所以是$A^2=P\Lambda^{2}P^{-1}$,依次类推,所以可以得出这个结论
所以具体步骤是
- 求出矩阵$A$的特征值和特征向量,如果特征值不等,就可以完成对角化
- 根据特征向量构造特征矩阵,对角阵$\Lambda$的对角线元素由$\lambda $构成
对角阵并不唯一,通过$A^n=P\Lambda^{n}P^{-1}$可以轻松求解矩阵高次幂
相似矩阵中的不变量
如果$A$和$B$是相似矩阵,那么,两者的特征值相同:
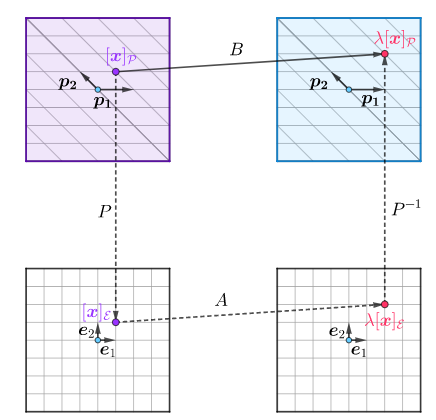
对比可知,$A$和$B$的特征值相同,但特征向量不同。但是:两个相似矩阵对应于同一个特征值的特征向量的个数是相等的
那么通过相似矩阵将其变换为基$\mathcal{P}$下的矩阵函数$B=P^{-1}AP$,对该向量的拉伸依然是$\lambda$倍,也就是说特征值保持不变:
性质
- 如果$A$和$B$是相似矩阵,那么两者的行列式相同:
实际上就是基的变化并不会影响到面积的改变
相似矩阵的迹相同
相似矩阵有相同的秩
对于$n$阶方阵$\boldsymbol{A}$,其主对角线(从左上方至右下方的对角线)的元素之和称为迹,记作$tr(\boldsymbol{A})$:
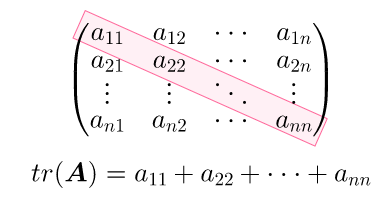
若$\lambda_1,\lambda_2,\cdots,\lambda_n$为$n$阶方阵$\boldsymbol{\boldsymbol{A}}$的特征值,则:
若$\boldsymbol{A}$和$\boldsymbol{B}$是相似矩阵,则两者的迹相同。即:
(反过来不一定成立)
判断矩阵相似
- 判定矩阵之迹 (相似矩阵的迹相同)
- 判定矩阵之秩(判定行列式是否为0)
- 判定特征值(求解特征值,相似矩阵的特征值相同)
- 判定对于同一个特征值,特征向量的个数是否相同,比如说特征值是3,2,2,那么特征值3就有两重根,则$\lambda=3$有两个线性无关的特征向量,说明$(\lambda E-A)x=0$有2个线性无关的解,则$Rank(\lambda E-A)=n-2$
只能符合这4个条件,才能判定是矩阵相似,特征值相同≠相似
正交基与正交矩阵
正交基
已知$\boldsymbol{p}_1,\boldsymbol{p}_2,\cdots,\boldsymbol{p}_r$是向量空间$V$的一个基,如果两两正交,即满足:
那么称其为正交基,如果还满足长度均为1,即:
那么,就称为标准正交基
如果基为正交基,那么求其正交基下的坐标就会变得很简单:
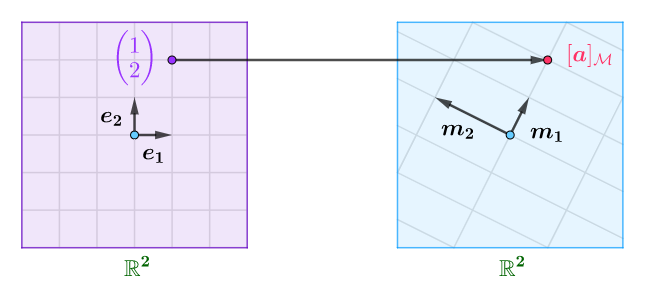
正交基:
并且已知向量在自然基下的坐标是$[\boldsymbol{a}]_\mathcal{E}=\begin{pmatrix}1\\2\end{pmatrix}$,求其在正交基下的坐标
本题当然可以用坐标变换公式求出,但是,因为是正交基下的特性,所以还要更简单的方法
根据坐标的定义有:
而$m_1$和$m_2$都是正交基,所以可以:
根据上式可推出:
同样的道理,有:
所以可以直接算出,坐标为
正交矩阵
假设$\boldsymbol{p}_1,\boldsymbol{p}_2,\cdots,\boldsymbol{p}_n$是向量空间$\mathbb{R}^n$的一个标准正交基,那么由它们构造的$n$阶方阵$P$也称为正交矩阵(Orthogonal Matrix):
该方阵$P$必然满足:
即$P^\mathrm{T}$就是$P$的逆矩阵。
施密特正交化
正交矩阵的逆矩阵很容易求出(因为转置矩阵就是其逆矩阵),如果在对角化中将用转置矩阵代替逆矩阵,那么可以大大降低对角化的求解难度:
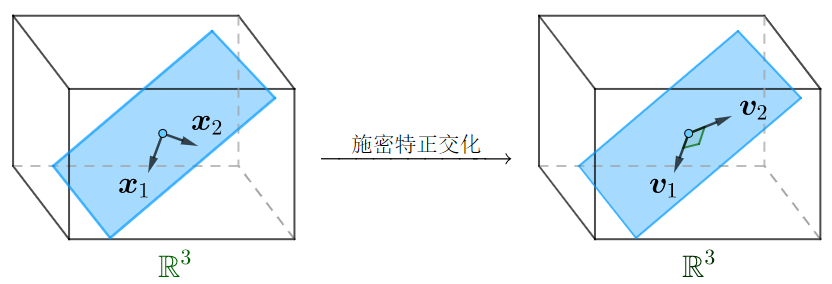
而构建正交矩阵的关键在于找到正交基,$R^2$和$R^3$的正交基很好找,就是各自的自然基,但是要寻找$R^3$中的平面的正交基,就需要利用到施密特正交化,此方法简单来说,就是借助该向量空间的一个基$\boldsymbol{x}_1,\boldsymbol{x}_2$,找到同一个向量空间的一个正交基$\boldsymbol{v}_1,\boldsymbol{v}_2:$
假设在二维空间中找到正交基
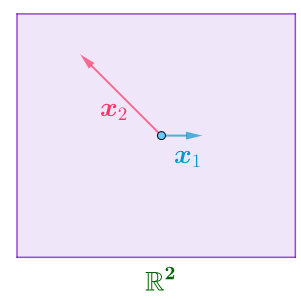
先确定一个向量作为标准基,比如说$x_1$,再作出$\boldsymbol{x_2}$在$\boldsymbol{v_1}$所在直线的投影向量$\overline{\boldsymbol{x_2}}$,连接$\boldsymbol{x_2}$和$\overline{\boldsymbol{x_2}}$就得到要求的垂线向量$\boldsymbol{v_2}$:
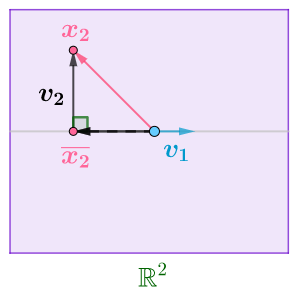
在这个过程中:
因为$\boldsymbol{v_2}$和$\boldsymbol{v_1}$正交,所以:
所以:
这样就得到了一组正交基$\boldsymbol{v}_1,\boldsymbol{v}_2$
总结如下:
在三维空间中,就是:
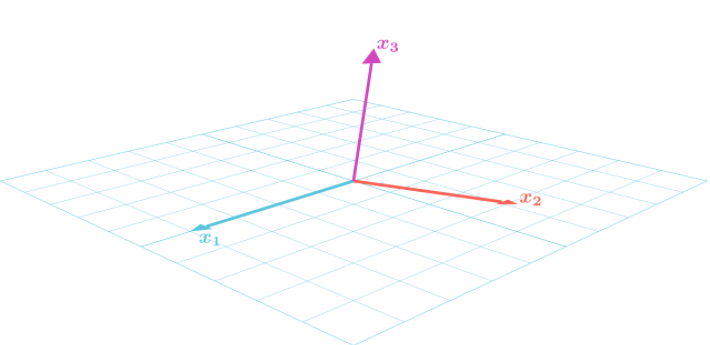
先将其中两个向量施密特正交化:
作出$\boldsymbol{x_3}$在$\boldsymbol{v_1},\boldsymbol{v_2}$张成平面上的投影向量$\overline{\boldsymbol{x_3}}$,连接$\boldsymbol{x_3}$和$\overline{\boldsymbol{x_3}}$就得到要求的垂线向量$\boldsymbol{v_3}$:
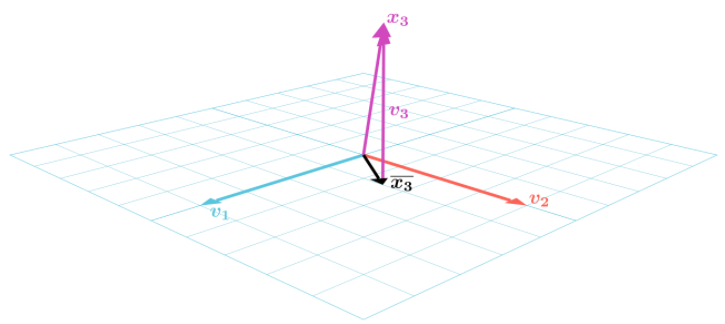
求出:
这种方法就是施密特正交法
正交对角化
已知对角化的过程是:
需要求逆矩阵,很复杂,而通过正交矩阵可以轻松求逆矩阵:
正交基构成了正交矩阵,但是,不是在标准空间里面的话,就需要用施密特正交化来求其正交基,继而求得求正交矩阵。
以上一整个过程叫做正交对角化
实对称阵
如果矩阵$A$是对称阵(即其转置是其本身的矩阵),且其中的每一个元素都是实数,那么称之为实对称阵。此时有如下性质:
若$\lambda_1,\lambda_2$是实对称阵$A$相异的特征值,$\boldsymbol{p}_1,\boldsymbol{p}_2$是$\lambda_1,\lambda_2$对应的特征向量,则有$\boldsymbol{p}_1$与$\boldsymbol{p}_2$正交,即:
根据上述性质就可以找到标准正交基中的第一个向量$\boldsymbol{\epsilon_1}$
并不是所有的矩阵都能完成正交对角化,只有实对称阵才行
找到第一个向量后,根据实对称阵的性质,将其作为基,与其他的特征向量是正交的
之后用施密特正交化其他的向量,使其正交,再单位化即可
来道经典例题:
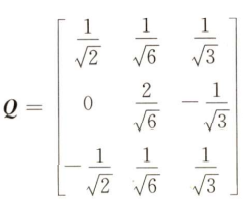
已知$A$是三阶实对称矩阵,若正交矩阵$Q$使得$Q^{-1}AQ=\begin{pmatrix}3&0&0\\0&3&0\\0&0&6\end{pmatrix}$,如果$a_1=(1,0,-1)^{T},a_2=(0,1,1)^{T}$是矩阵$A$属于特征值$\lambda=3$的特征向量,则$Q$是多少?
如果已知两个特征向量,那么根据实对称矩阵的性质,可以求出第三个特征向量,再拓展一下,即使只知道一个特征向量$a_1$,如果另外两个特征向量对应的特征值相等,那么可以根据$a_2×a_1=0,a_3×a_1=0$,通过基础解系解出$a_2$和$a_3$
解:已知实对称矩阵不同特征值两两正交,所以可以解出$a_3$

因为$a_1,a_2$不正交,所以要用施密特正交化处理

将处理后的向量单位化
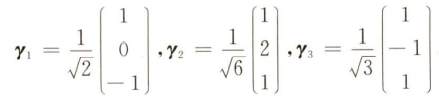
组合起来即是$Q$
正交变换中求正交矩阵的方法一共有2种,如下:
- 利用特征值算出特征向量,如果特征值各不相同,只需要将各个特征向量单位化,组成的矩阵即是正交矩阵,如果特征值有相同的,则需要进行施密特正交化,然后再组成正交矩阵
- 直接利用拉格朗日配方法,写出$x$到$y$的变化的关系式,可以根据$x$到$y$的关系的相关系数,直接得到正交矩阵
二次型
在数学中,关于一些变量的二次齐次多项式被称为二次型(Quadratic form)
$f$是一个定义在$\mathbb{R}^n$上的二次型,它可改写为:
其中$\boldsymbol{A}$是$n\times n$的对称阵,该矩阵$\boldsymbol{A}$称为$f$的二次型矩阵
二次型到矩阵
判断矩阵的大小,应该为$n$阶方阵,$n$为变量的个数
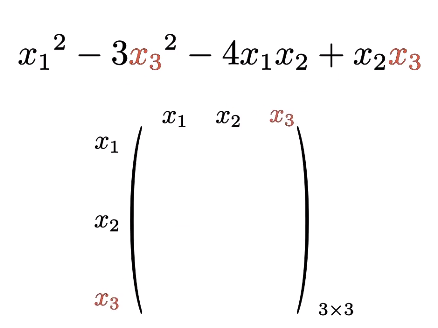
将二次型的平方项保留,交叉项平分
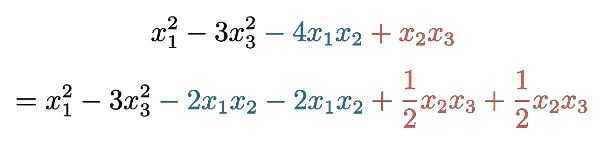
平方项的系数自然是对角线上的数,而交叉项的系数是根据其下标交叉的值
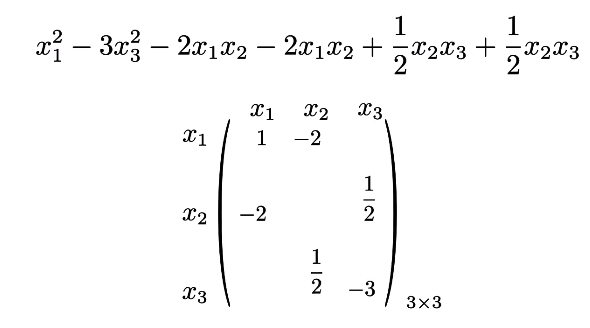
剩下的位置置0
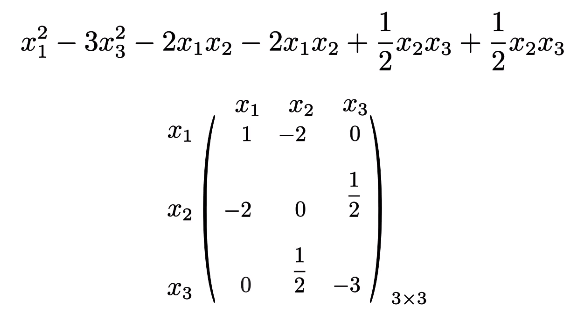
这样就完成了从二次型到矩阵,而从矩阵到二次型,只需要将过程反过来就行了
合同矩阵
定义 :设$\boldsymbol{A}和\boldsymbol{B}$是$n$阶方阵,若有可逆矩阵$\boldsymbol{P}$,使$\boldsymbol{B}=\boldsymbol{P}^\mathrm{T}\boldsymbol{A}\boldsymbol{P}$,则称矩阵$\boldsymbol{A}$和$\boldsymbol{B}$合同,或者称$\boldsymbol{B}$是$\boldsymbol{A}$的合同矩阵
合同矩阵适用于曲线的旋转,符合转置矩阵的意义
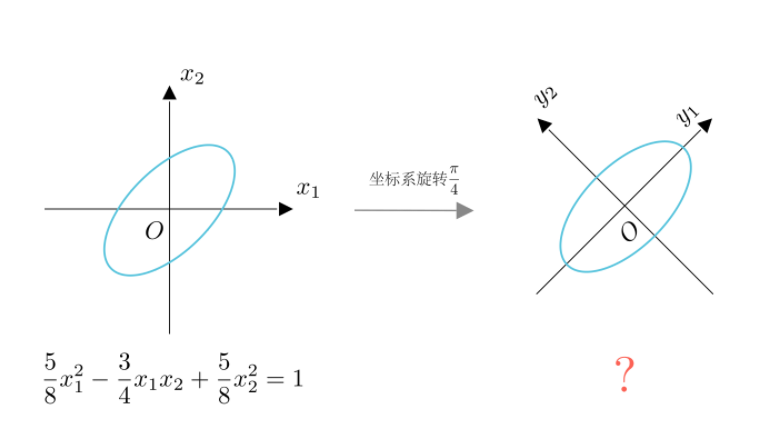
本题可通过三个步骤完成:
(1)将椭圆改写为$[\boldsymbol{x}]_\mathcal{E}^\mathrm{T}\boldsymbol{A}[\boldsymbol{x}]_\mathcal{E}=1$,得到其在自然基$\mathcal{E}$下的方程;
(2)利用合同矩阵,得到基$\mathcal{P}$下的椭圆方程$[\boldsymbol{x}]_\mathcal{P}^\mathrm{T}\boldsymbol{B}[\boldsymbol{x}]_\mathcal{P}=1;$
(3)将基$\mathcal{P}$下的方程$[\boldsymbol{x}]_\mathcal{P}^\mathrm{T}\boldsymbol{B}[\boldsymbol{x}]_\mathcal{P}=1$写回一般形式即可。
条件
矩阵合同的条件是:两个矩阵的正,负惯性系数相同
如果$A$是实对称矩阵,那么和$A$合同的矩阵也是实对称矩阵
标准形和合同对角化
判断二次型的曲线类型,可以通过合同对角化判断
标准形:只含平方项的二次型
称为二次型的标准形,或者简称为标准形。其二次型矩阵一定为$n$阶对角阵:
合同矩阵只是对二次型进行坐标变换,并不会改变曲线类型,所以可借助合同矩阵来去掉交叉项。过程如下:
比如判断$x_1x_2=1$的曲线类型:
改写。根据二次型矩阵的构造方法,方程$x_1x_2=1$中的$x_1x_2$对应的二次型矩阵为:
令$\boldsymbol{x}=\begin{pmatrix}x_1\\x_2\end{pmatrix}$,那么方程$x_1x_2=1$可改写为:
通过合同矩阵,将$\boldsymbol{A}$化为对角阵$\boldsymbol{\Lambda}$。该二次型矩阵$\boldsymbol{A}$是实对称阵,所以必然可正交对角化,从而得到$\boldsymbol{A}$的合同矩阵$\boldsymbol{\Lambda}$:
其中$\boldsymbol{P}=\begin{pmatrix}\displaystyle\frac{\sqrt{2}}{2}&-\displaystyle\frac{\sqrt{2}}{2}\\\displaystyle\frac{\sqrt{2}}{2}&\displaystyle\frac{\sqrt{2}}{2}\end{pmatrix}$是正交矩阵,有$\boldsymbol{P}^{-1}=\boldsymbol{P}^\mathrm{T}。$
去除交叉项。因为$\boldsymbol{A}=\boldsymbol{P}\boldsymbol{\Lambda}\boldsymbol{P}^\mathrm{T}$,所以:
令$\boldsymbol{y}=\boldsymbol{P^\mathrm{T}}\boldsymbol{x}=\begin{pmatrix}y_1\\y_2\end{pmatrix}$,则:
因为是$x_1x_2=1$通过合同矩阵得到的去除交叉项后的$\frac{1}{2}y_1^2-\frac{1}{2}y_2^2=1$,所以两者对应的其实是同一个曲线,曲线类型没有发生变化。$\frac{1}{2}y_1^2-\frac{1}{2}y_2^2=1$的系数为一正一负,所以是双曲线,从而$x_1x_2=1$是双曲线。
这种方法叫做正交合同对角化
实际上,其实对于任意的二次型, 为求得其标准型, 我们所需要做的就是求得二次型矩阵的特征值,并不需要求其正交矩阵
由于对角阵并不唯一,所以标准型也不唯一,但是标准型的正,负惯性系数肯定是相同的
拉格朗日配方法
具体步骤为:
遇到二次型中的平方项$x_i^2$,就把含有$x_i$的项集中起来,然后配方;
遇到$x_ix_j$,且没有平方项$x_i^2或x_j^2$,则进行函数换元:
上述操作会产生平方项,再回到(1)去尝试配方;
不断重复(1)、(2),直至消去所有的交叉项。
例 请通过拉格朗日配方法来判断$x_1x_2=1$的曲线类型。
解 (1)完成拉格朗日配方法。首先对$x_1x_2$进行函数换元:
则:
这样就得到了$x_1x_2$的不同的标准形
只能适用于实对称矩阵的的秩为满秩的情况,拉格朗日正交法的本质是坐标变换,如果矩阵不满秩,自然不能进行坐标变换
可以通过配方法来快速求出合同矩阵$P$,比如二次型$2x_1x_3+x_2^2$,令
可以拆成是$2y_1+y_3(y_1-y_3)+y_2^2=2y_1^2+y_2^2-2y_3^2$,化为标准型,根据$x=Cy$,可以得出$C$的形式
当然这个矩阵不唯一
惯性定理
对于某二次型$f$,通过合同对角化可化为多个标准形。这些标准形共同的特点为,其正系数的数目(也称为正惯性指数)、负系数的数目(也称为负惯性指数)以及 0 系数的数目都相同。该定理称为西尔维斯特惯性定理,简称惯性定理。
设二次型$f(\boldsymbol{x})=\boldsymbol{x}^TA\boldsymbol{x}$,则它是:
- 正定的,如果对所有$\boldsymbol{x}\neq \boldsymbol{0}$,有$f(\boldsymbol{x}) > 0$
- 半正定的,如果始终有$f(\boldsymbol{x}) \geq 0$
- 负定的,如果对所有$\boldsymbol{x}\neq \boldsymbol{0}$,有$f(\boldsymbol{x}) < 0$
- 半负定的,如果始终有$f(\boldsymbol{x}) \leq 0$
- 不定的,如果$f(\boldsymbol{x})$既有正值又有负值
判断正定矩阵的方法:
已知二次型$f(\boldsymbol{x})=\boldsymbol{x}^T\boldsymbol{A}\boldsymbol{x}$,其为正定的充分必要条件是,$\boldsymbol{A}$的各阶顺序主子式都为正,等同于正惯性系数$p=n$,即:
为负定的充分必要条件是,奇数阶顺序主子式为负,而偶数阶顺序主子式为正,即:
这个定理称为赫尔维茨定理
正定的必要条件:$a_{ii}>0$,特征值都>0
求正惯性系数的方法:
方法1:对应的对称矩阵的正特征值的个数(重根算一个)
方法2:将二次型通过拉格朗日配方法转换为标准形
正惯性系数+负惯性系数=矩阵的秩
设$x=(x_1,x_2,x_3)^T$,求$x^Tx=1$时,$x^TAx$的最大值
在已知$A$特征值的情况下,存在正交矩阵$P$,经正交变换$x=Py$化二次型$x^TAx$为标准型
$(y_1^2+y_2^2+y_3^2)=1$因为模长为1,结论很好理解,因为$(y_1^2+y_2^2+y_3^2)=1$,所以让$max[\lambda]$之后的那个$y=1$即是最大值
