
2.5.矩阵函数
矩阵函数
定义
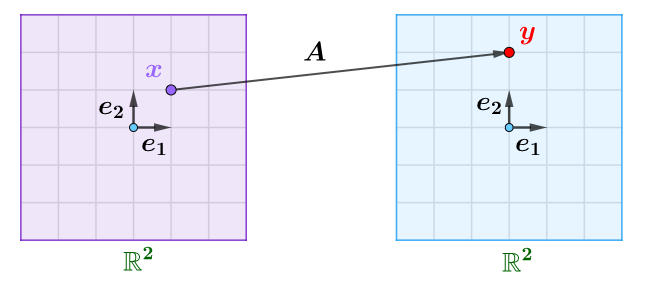
如果将矩阵左乘$Aa=b$中的常向量$a$,$b$变为位置向量$x$,$y$,就得到了矩阵函数$Ax=y$
相对于矩阵左乘这种运算而言,矩阵函数是更抽象、更核心的数学概念
旋转矩阵
该矩阵左乘$Aa=b$的结果是,让$b$相对$a$逆时针旋转了$\theta$,所以称该矩阵为旋转矩阵
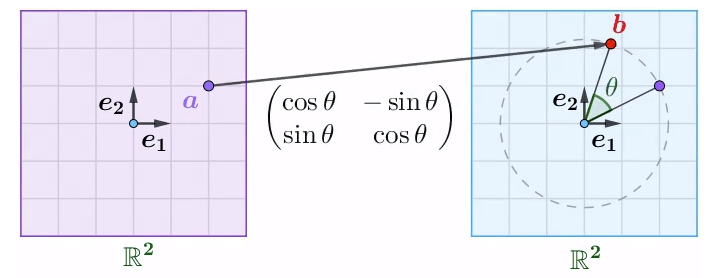
将旋转矩阵看做是
两个列向量,显然$e_1×c_1$会导致$e_1$逆时针旋转,而$e_2$在$y$轴上,根据三角公式
所以也会逆时针旋转
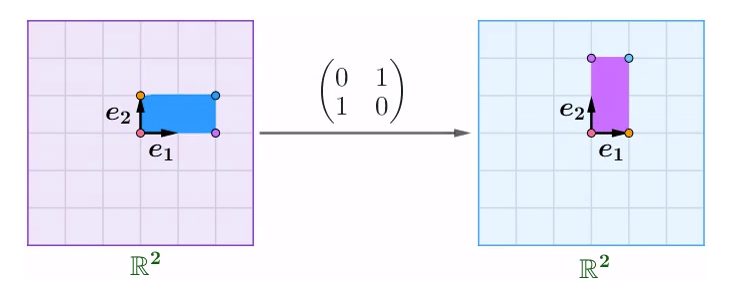
镜像矩阵
从矩阵函数的观点看初等行变化,对换变化中的二阶矩阵就是镜像矩阵
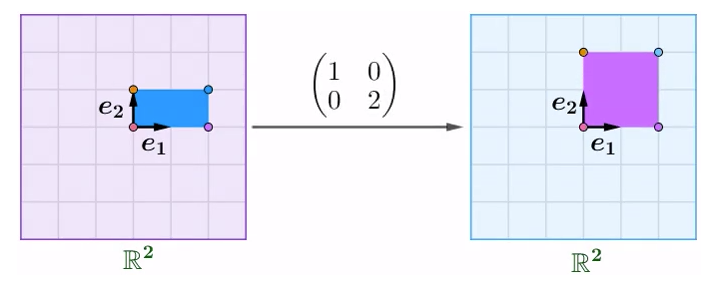
伸缩矩阵
从矩阵函数的观点看初等行变化,倍乘变化中的矩阵就是伸缩矩阵,格式为:
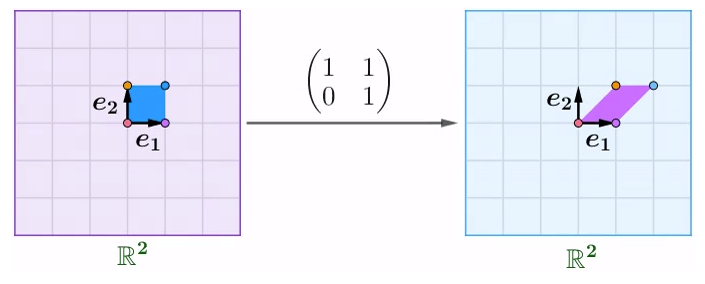
剪切矩阵
从矩阵函数的观点看初等行变化,倍加变化中的矩阵就是剪切矩阵,格式为:
列向量为:
在列向量的作用下,输出向量$y$在$e_1$方向上进行了平移

秩
定义
之前在向量一章中提到过:
虽然向量组的最大无关组并不唯一,但是最大无关组包含向量的数目是相同的,此不变的数目就称为秩(rank)
向量组的最大无关组中向量的数目就是秩,而在矩阵中,要分为列空间和行空间的秩进行讨论
包含所有列向量的向量组称为列向量组,记作$colsp(A)$,即:
列向量组的秩,也就是列空间的维度,称为列秩,如果列向量组线性无关,就称为列满秩
包含所有行向量的向量组称为行向量组,记作$rowsp(A)$,即:
行向量组的秩,也就是行空间的维度,称为行秩,如果行向量组线性无关,就称为行满秩
对任意矩阵,始终有列秩等于行秩,所以统称为矩阵的秩,矩阵$A$的秩记作$rank(A)$
因为行秩=列秩=秩,所以在自然定义域下时,秩就是矩阵函数的值域的维度
如果某个矩阵,既是列满秩,又是行满秩,那么就称该矩阵为满秩矩阵,或者称为满秩。满秩矩阵必为方阵
两个矩阵等价$\Leftrightarrow$ 两个矩阵的秩相同
性质
秩的取值范围:
矩阵经过转置后,秩不变
满秩矩阵复合的秩。假设$P$、$Q$为满秩矩阵,那么:
矩阵相加的秩,假设$A$,$B$为同型矩阵,那么
复合函数的秩:
如果$AB=O$,$A,B$为$n$阶矩阵,那么
函数的四要素
定义域:集合$X$
映射法则$f$:指明$X$中的元素怎么和$Y$元素关联
值域:通过映射法则$f$和定义域$X$决定,表示$X$映射到$Y$中的值
到达域:集合$Y$

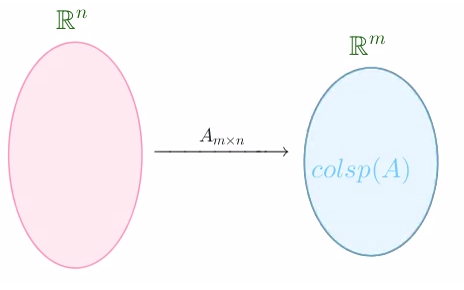
对于$m×n$的矩阵:
自然定义域为$R^n$,因为$n$维向量$\boldsymbol{x_{}}=\begin{pmatrix}x_1\\x_2\\\vdots\\x_n\end{pmatrix}$为$R^n$中的任意向量
映射法则为矩阵$A$以及矩阵乘法的规则
值域为$Ax$
到达域为$R^m$,因为$\boldsymbol{y_{}}=\begin{pmatrix}y_1\\y_2\\\vdots\\y_m\end{pmatrix}$是$m$维向量,所以值域必然在$R_m$中
映射法则分几种情况
单射:映射法则是单的,简称单射,当且仅当每一个$y$至多有一个$x$与之对应

满射:映射法则是满的,简称满射,当且仅当每一个$y$至多有一个$x$与之对应,此时值域与到达域相等

双射:即是单射又是满射

总结:

列向量矩阵$Ax=y$的四要素
行向量矩阵$x^TA=y^T$的四要素
函数的单射
定义域维度=值域维度时,才能形成单射
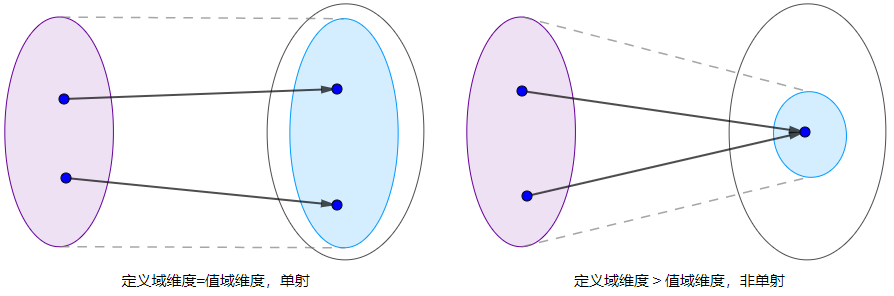
那么只要行满秩,或者列满秩的情况下,矩阵函数才会不改变函数的维度
只有单射情况下,线性方程才有唯一解,当然也有可能无解(解在值域外,到达域中)
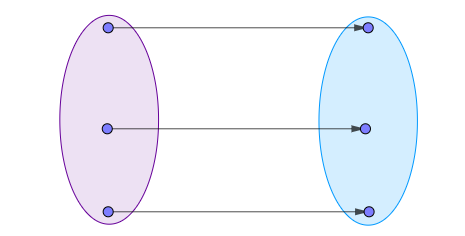
函数的满射
只有值域$colsp(A)$和到达域$R^m$一样时,列向量$Ax=y$才会满射
假设$A$为$m×n$的矩阵,满射时,必有$Rank(colsp(A))$=$R^m$
那么就要求,矩阵的列秩必须是$m$,而行秩=列秩,所以行秩为$m$,行满秩
所以满射条件是:
只有函数在满射的情况下,方程才有解
函数的双射
双射就是即是单射,又是满射,结合两者的成立条件:
总结
| 单射 | 满射 | 结果 |
|---|---|---|
| √ | √ | 必有解,且为唯一解 |
| √ | × | 有可能有解,有可能无解,若有解,必为唯一解 |
| × | √ | 必然有解,解必然不唯一 |
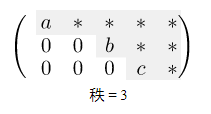
秩的求法
秩很容易求出来,可以将矩阵化为行阶梯形矩阵,秩就是非零行的个数
在行最简形矩阵的基础上,再执行若干次初等行变化,就可以得到形式更简单地矩阵,特点是左上角是单位阵
这种矩阵被称为标准形
实际上标准型非常好求出来,只需要判断矩阵的秩,然后再对角线上填上等于秩个数的$1$即可
逆矩阵
定义
如果函数只有单射,或只是满射,那么无法建立起逆矩阵,只有在双射情况下,矩阵才有逆矩阵
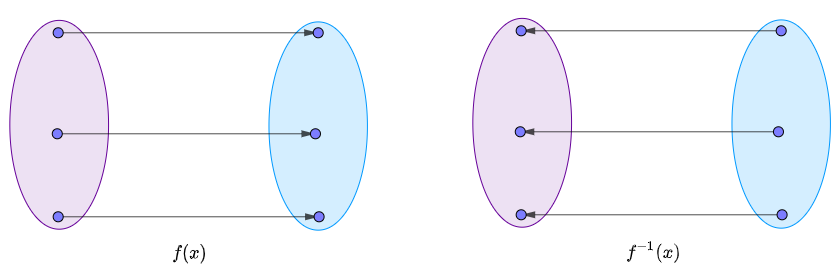
所以根据矩阵双射的条件有:
当矩阵$A$为满秩矩阵时,对应的矩阵函数为双射,此时$A$存在反函数,称为$A$可逆。其反函数记作$A^{-1}$,称为$A$的逆矩阵
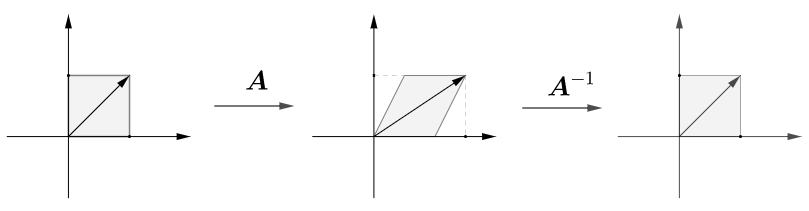
之前提到过,单位阵$I$的定义如下

而对图形先运用矩阵$A$,再运用逆矩阵$A^{-1}$,图形同样不会发生变化
逆矩阵定义如下:若存在两个$n$阶矩阵$A$,$C$,两者的乘积为$n$阶单位阵$I$:
那么$C$就是$A$的逆矩阵,即有$A^{-1}=C$,且$A^{-1}$是惟一的
求法
如果可以通过一系列初等行矩阵$E^i$,将矩阵$A$变换成单位阵$I$,则$A$的逆矩阵就是这些初等行矩阵的乘积:
实际上分为两步:
- 先通过一系列初等行矩阵,将矩阵$A$变换成单位阵$I$
- 然后将这些初等行矩阵相乘得到逆矩阵
联系到之前提到过的高斯消元法,可以将这两步合并在一起进行
首先将矩阵$A$和$I$合成一个矩阵$( A|I )$,然后在新矩阵$( A|I )$上运用一系列初等行矩阵。这样就可以在得到单位阵的同时,得到逆矩阵:
实际上这里利用分块矩阵的方法,将一个矩阵成了两块,每块都乘以$A^{-1}$
性质
若$A,B$是同阶方阵且均可逆,则$AB$也可逆,且
若$A$可逆,则$A^T$也可逆,且:
分块矩阵的逆矩阵:
分块矩阵
定义
对于行数和列数较多的矩阵$A$,运算时采用分块法,将大矩阵的运算化为小矩阵的运算
可以改写成如下形式:
分块矩阵的形式多种多样,可以任意划分
运算规则
分块矩阵的运算规则和普通矩阵的几乎一样
加法:
数乘:
乘法:
分块对角矩阵
设$A$是方阵,若$A$的分块矩阵在对角线上的子块$A_i(i=1,2,\cdots,s)$都是方阵,其余子块都是零矩阵,那么称$A$为分块对角矩阵
该分块对角矩阵$A$的秩等于对角线上子块的秩的和
当$A_i(i=1,2,\cdots,s)$不是方阵时,上述定理依然有效
